
HMS Industrial Networks: Terus melangkah
Tantangan Komunikasi & Keamanan yang Dihadapi Produsen Robot Berjalan. Robot berjalan (mobile robot) ada di mana-mana, mulai dari gudang, rumah sakit, hingga jalanan. Robot jenis ini populer karena lebih murah, aman, mudah ditemukan, dan produktif dibandingkan pekerja manusia.

Selain itu, robot ini mudah diskalakan atau digabungkan dengan mesin lainnya. Saat robot berjalan mengumpulkan data secara real-time, perusahaan dapat menggunakan robot berjalan untuk memulai perjalanan IIoT.
Namun agar bekerja secara efisien, robot berjalan butuh komunikasi yang aman dan andal. Artikel ini merangkum tantangan utama seputar komunikasi dan keamanan yang dihadapi produsen robot berjalan serta memberikan cara mudah untuk mengatasi tantangan ini agar robot berjalan dapat terus melangkah.
Apa itu Robot Berjalan?
Sebelum dimulai, mari kita definisikan arti robot berjalan.
Robot berjalan mengantar materi dari satu lokasi ke lokasi lain dan memiliki dua jenis, kendaraan berpemandu otomatis (automated guided vehicle/AGV) dan robot berjalan otomatis (autonomous mobile robot/AMR). AGV menggunakan infrastruktur berpemandu (reflektor kabel, reflektor, dan pita magnetis) untuk mengikuti rute yang sudah ditentukan sebelumnya. Jika sebuah objek menghalangi jalur AGV, AGV berhenti dan menunggu sampai objek tersebut hilang.
AMR lebih dinamis. Robot berjalan otomatis bergerak dengan bantuan peta dan menggunakan data dari kamera, sensor internal, atau pemindai laser untuk mendeteksi sekelilingnya dan memilih rute yang paling efisien untuk dilalui. Jika sebuah objek menghalangi rute yang sudah direncanakan AMR, AMR ini akan memilih rute lain. Karena tidak bergantung pada infrastruktur berpemandu, AMR cepat untuk dipasang dan dapat beradaptasi dengan perubahan logistik.
Apa saja Tantangan Komunikasi dan Keamanan yang Dihadapi Produsen Robot Berjalan?
1. Membuat Koneksi Nirkabel
Tantangan pertama bagi produsen robot berjalan adalah memilih teknologi nirkabel yang paling sesuai. Saran pada umumnya adalah menetapkan persyaratan, mengevaluasi standar, dan memilih opsi terbaik. Sayangnya, hal ini tidak selalu memungkinkan bagi produsen robot berjalan karena sering kali mereka tidak tahu mesin ini akan diletakkan di mana atau detail selengkapnya terkait penerapan mesin.
Terkadang, koneksi Bluetooth bisa jadi opsi ideal karena koneksi ini menawarkan koneksi stabil yang tidak padat, sementara penerapan lainnya akan membutuhkan koneksi seluler berkecepatan tinggi yang aman. Yang akan membantu produsen robot berjalan adalah teknologi jaringan yang mudah diubah untuk memenuhi persyaratan tertentu.
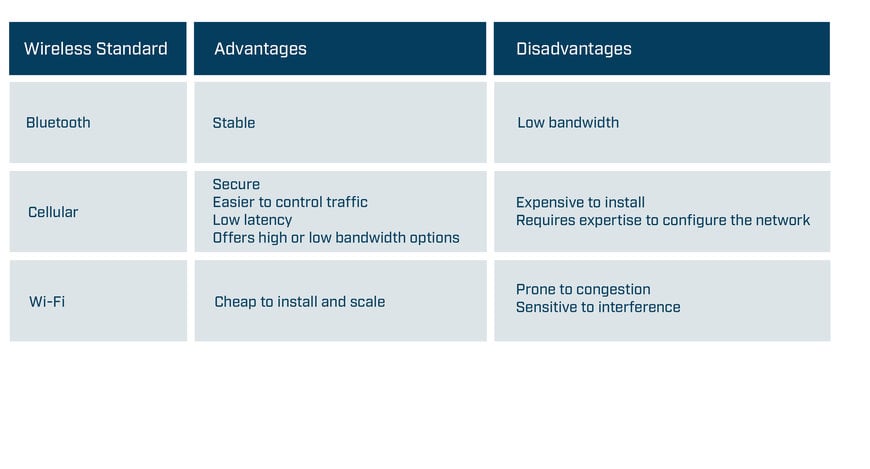
Kelebihan dan kekurangan tingkat tinggi standar nirkabel
Tantangan kedua adalah memastikan pemasangan berfungsi sesuai rencana. Sebelum memasang solusi nirkabel, selesaikan survei lokasi yang prediktif berdasarkan denah fasilitas untuk memastikan robot berjalan memiliki cakupan sinyal yang cukup di lokasi. Proses survei lokasi harus mengidentifikasi lokasi optimal untuk Titik Akses, jenis antena yang tepat, sudut antena yang optimal, dan cara meredakan gangguan. Setelah pemasangan, gunakan alat sniffer nirkabel untuk memeriksa desain dan menyesuaikan AP atau antena seperlunya.
Robot berjalan perlu berkomunikasi dengan alat pengendali di lokasi yang relevan meskipun robot berjalan dan alat pengendali sering kali menggunakan protokol industri yang berbeda. Misalnya, AGV mungkin menggunakan CANopen, sedangkan alat pengendali menggunakan PROFINET. Selain itu, produsen robot berjalan mungkin ingin menggunakan model AGV yang sama di lokasi yang berbeda di mana alat pengendali menggunakan jaringan industri lain, seperti EtherCAT.
Produsen robot berjalan juga harus memastikan bahwa robot berjalannya memiliki kapasitas yang cukup untuk memproses jumlah data yang diperlukan. Jumlah data yang cukup akan bervariasi bergantung ukuran dan jenis pemasangan. Pemasangan berskala besar mungkin menggunakan lebih banyak data karena algoritma pemilihan rute perlu menjangkau area yang lebih besar, kendaraan yang lebih banyak, dan rute berpotensi yang lebih banyak. Sistem navigasi seperti navigasi visi memproses gambar sehingga memerlukan daya pemrosesan lebih besar dibandingkan pemasangan menggunakan sistem navigasi seperti reflektor. Oleh karena itu, produsen robot berjalan harus mengatasi tantangan berikut:
Mereka butuh teknologi jaringan yang mendukung semua jaringan Ethernet industri dan fieldbus besar.
Solusi ini harus mudah mengubah teknologi jaringan agar memungkinkan robot berjalan berkomunikasi di jaringan industri yang sama dengan alat pengendali tanpa mengubah desain perangkat keras.
Mereka harus memastikan bahwa teknologi jaringan memiliki kapasitas dan fungsionalitas yang cukup untuk memproses data yang diperlukan.
3. Membuat Sistem yang Aman
Membuat sistem di mana robot berjalan dapat mengantar materi dengan aman merupakan tugas yang penting dan menantang. Produsen robot berjalan perlu membuat sistem yang mempertimbangkan semua jenis mobil berjalan, struktur, dan orang di lingkungan. Mereka juga harus memastikan bahwa robot berjalan bereaksi terhadap tindakan eksternal, seperti seseorang membuka pintu pengaman atau menekan tombol berhenti darurat, serta solusi jaringan dapat memproses beragam antarmuka dan protokol keamanan. Mereka harus mempertimbangkan bahwa AMR bergerak dengan bebas dan mengelola risiko tabrakan dengan tepat. Teknologi yang digunakan dalam sensor terus berkembang, dan produsen robot berjalan harus mengikuti perkembangan untuk memastikan produk mereka agar tetap efisien.
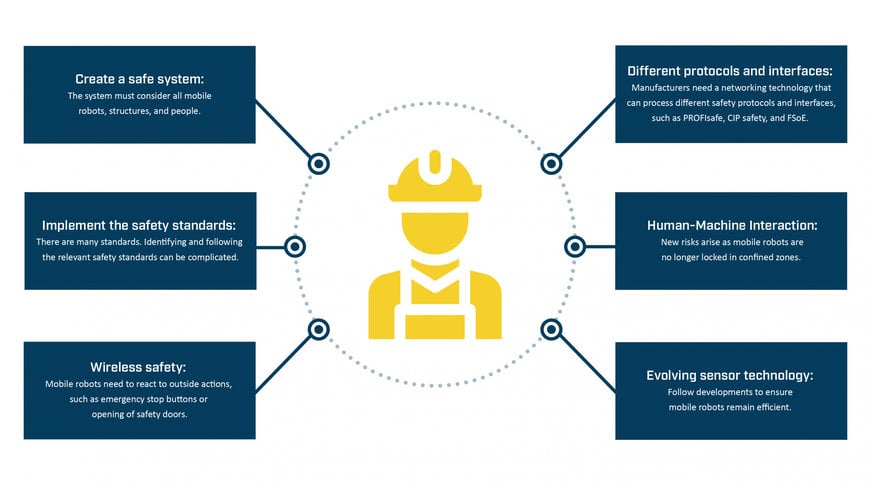
Ringkasan Tantangan Keamanan bagi Produsen Robot Berjalan
Standar Keamanan
Standar keamanan memberikan pedoman dalam mengimplementasikan komponen terkait keamanan, mempersiapkan lingkungan, dan merawat mesin atau peralatan.
Meskipun kepatuhan terhadap beragam standar keamanan (ISO, DIN, IEC, ANSI, dll.) sebagian besar sifatnya tidak wajib, pembuat mesin di Uni Eropa secara hukum diwajibkan untuk mengikuti standar keamanan dalam pedoman permesinan. Pedoman permesinan 2006/42/EC selalu berlaku bagi produsen robot berjalan, dan pada sebagian penerapan, pedoman 2014/30/EU mungkin juga relevan karena pedoman ini mengatur kompatibilitas elektromagnetik peralatan. Pedoman permesinan 2006/42/EC menjelaskan persyaratan untuk desain dan konstruksi mesin yang aman, yang akan diperkenalkan ke pasar Eropa. Produsen hanya bisa membubuhkan label CE dan mengirimkan mesin kepada pelanggan jika mereka dapat membuktikan dalam deklarasi kesesuaian label bahwa mereka telah memenuhi persyaratan pedoman.
Meskipun standar keamanan lainnya tidak wajib, produsen tetap harus mengikutinya karena standar ini membantu memenuhi persyaratan dalam pedoman permesinan 2006/42/EC. Misalnya, produsen dapat mengikuti pedoman dalam ISO 12100 untuk menurunkan risiko yang teridentifikasi terhadap risiko residual yang dapat diterima. Mereka juga dapat menggunakan ISO 13849 atau IEC 62061 untuk menemukan tingkat keamanan yang diperlukan untuk setiap risiko dan memastikan bahwa fungsi terkait keamanan yang sesuai memenuhi persyaratan yang ditentukan. Produsen robot berjalan memutuskan bagaimana mereka mencapai tingkat keamanan tertentu. Misalnya, mereka dapat menurunkan kecepatan robot berjalan untuk menurunkan risiko tabrakan dan tingkat keparahan cedera ke tingkat yang dapat diterima. Selain itu, mereka dapat memastikan bahwa robot berjalan hanya beroperasi dalam zona terpisah yang tidak boleh diakses manusia (didefinisikan sebagai zona terbatas dalam ISO 3691-4).
Mengidentifikasi standar yang tepat dan mengimplementasikan persyaratan adalah cara terbaik bagi produsen robot berjalan dalam membuat sistem yang aman. Namun, saran yang kami berikan ini merupakan proses yang rumit dan menghabiskan banyak waktu.
4. Memastikan Komunikasi CAN yang Andal
Sebagai standar yang andal dan mudah diimplementasikan sejak tahun 1980-an, komunikasi berbasis teknologi CAN ini masih populer, utamanya karena digunakan dalam berbagai industri yang lagi naik daun, seperti Mobilitas Listrik (E-Mobility) dan Sistem Penyimpanan Energi Baterai (Battery Energy Storage System/BESS). CAN itu sederhana, hemat biaya serta energi. Semua perangkat di jaringan dapat mengakses semua informasi, dan memiliki standar terbuka, yang berarti pengguna dapat beradaptasi dan memperluas pesan untuk memenuhi kebutuhannya.
Bagi produsen robot berjalan, membuat koneksi CAN menjadi makin penting karena koneksi ini memungkinkan mereka memantau baterai ion litium yang sering digunakan dalam sistem penggerak robot berjalan, baik dalam sistem retrofit atau dalam pemasangan baru. Produsen robot berjalan harus melakukan yang berikut:
1. Membuat koneksi yang andal ke standar komunikasi CANopen atau CAN untuk memungkinkan mereka memeriksa perangkat, seperti memantau status dan kinerja baterai.
2. Melindungi sistem dari gangguan elektromagnetik (EMI), karena EMI dapat menghancurkan alat elektronik sistem. Risiko EMI tergolong signifikan dalam retrofit saat menambahkan komponen baru, seperti baterai di samping kabel komunikasi, yang menyebabkan gangguan elektromagnetik berfrekuensi tinggi.
5. Mengakses Robot Berjalan dari Jarak Jauh
Kemampuan untuk mengakses sistem kendali mesin dari jarak jauh dapat memungkinkan teknisi atau vendor robot berjalan untuk memecahkan masalah dan mengatasi sebagian besar masalah tanpa harus datang ke lokasi.
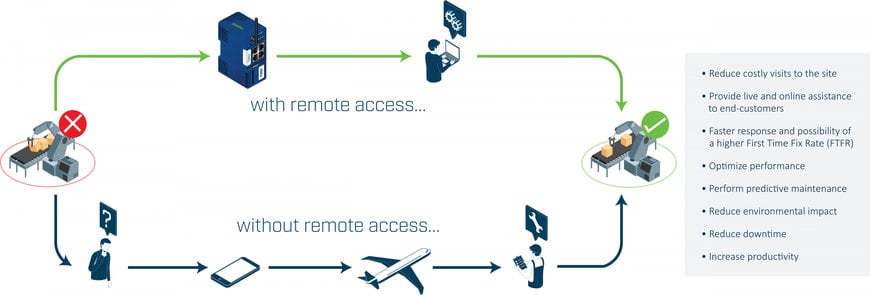
Manfaat Akses Jarak Jauh
Tantangannya adalah membuat solusi akses jarak jauh yang menyeimbangkan kebutuhan departemen IT dengan kebutuhan teknisi atau vendor.
Departemen IT ingin memastikan bahwa jaringan tetap aman, andal, dan mempertahankan integritas. Oleh karena itu, solusi akses jarak jauh harus menyertakan tindakan keamanan berikut:
- Menggunakan koneksi outbound, bukan inbound, untuk mempertahankan dampak pada firewall agar tetap minimum.
- Memisahkan traffic yang relevan dari bagian jaringan lainnya.
- Mengenkripsi dan melindungi semua traffic untuk memastikan kerahasiaan dan integritasnya.
- Memastikan bahwa vendor bekerja selaras dengan atau memiliki sertifikat untuk standar keamanan yang relevan seperti ISO 27001
- Memastikan bahwa pemasok menyelesaikan audit keamanan reguler.
Teknisi atau vendor ingin sistem yang dapat diandalkan dan mudah digunakan. Solusi harus mudah digunakan bagi pengguna untuk menghubungkan ke robot berjalan dan mengakses informasi yang diperlukan. Jika pemasangan mungkin berubah, pemasangan harus mudah untuk menskalakan sejumlah robot sesuai keperluan. Jika robot berjalan berada di negara yang berbeda dari vendor atau teknisi, infrastruktur jaringan harus memiliki redundansi dan cakupan yang memadai untuk menjamin ketersediaan di seluruh dunia.
Kesimpulan
Praktik terbaik untuk mengimplementasikan komunikasi robot berjalan
Tidak banyak produsen robot berjalan yang memiliki pakar keamanan atau komunikasi. Oleh karena itu, mereka butuh banyak waktu dan biaya untuk mencoba dan mengembangkan teknologi komunikasi secara internal. Menggunakan solusi komunikasi pihak ketiga yang dibuat sesuai tujuan tidak hanya mengatasi tantangan komunikasi yang sedang dialami dan juga memberikan manfaat lainnya.
Solusi komunikasi modern memiliki desain modular memungkinkan produsen robot berjalan menghilangkan satu produk jaringan yang dirancang untuk satu standar atau protokol dan menggantikannya dengan produk yang dirancang untuk standar atau protokol yang berbeda tanpa memengaruhi bagian mesin lainnya. Misalnya, Bluetooth mungkin standar nirkabel yang paling sesuai dalam satu pemasangan, sedangkan Wi-Fi mungkin memberikan cakupan yang lebih baik dalam pemasangan lain. Demikian pula, satu lokasi dapat menggunakan protokol PROFINET dan PROFIsafe, sedangkan lokasi lain dapat menggunakan protokol keamanan dan industri yang berbeda. Dalam kedua skenario, produsen robot berjalan dapat menggunakan produk komunikasi untuk mengubah teknologi jaringan untuk memenuhi persyaratan setempat tanpa membuat perubahan apa pun terhadap desain perangkat keras.
Penulis:
Mark Crossley, Daniel Heinzler, Fredrik Brynolf, Thomas Carlsson
HMS Networks
HMS Networks adalah pakar komunikasi industri yang terletak di Swedia, menyediakan beragam solusi untuk komunikasi AGV. Baca selengkapnya di www.hms-networks.com/agv
